 手机直线:
手机直线: 咨询热线:0571-56211150
咨询热线:0571-56211150








并联机器人最早于1978年由澳大利亚机构学专家Hunt提出,由于它与串联机器人在性能方面的互补关系,具有刚度大,结构稳定,在相同的自重和体积下有较高的承载能力,位移误差较小而运动精确度高,驱动部件大多可布置在机座上而减少了运动惯性和负荷。随着并联机器人应用领域的日益扩展,尤其在太空探索、采矿业以及机械设备如机床、工业机器人上的应用,并联机器人的应用已经超出了体积小、重量轻、速度低的限制。本研究对平面并联机器人建立刚性模型,采用闭环线型原理建立理论运动学线性模型,并利用Matlab7.1软件编程计算出理论输出位移和方位角(Jacobian矩阵),然后用ANSYS软件对其进行有限元分析,得到有限元运动学模型(Jacobian矩阵值),最后讨论两者结果,发现有限元模型比理论模型要精确。
3RRR平面并联机构的模型,该机构的运动副采用整体柔性铰链,用3个压电陶瓷(PZT)作为机构驱动器。我们这里采用刚性模型,将图简化成3RRR并联机构原理图(刚性模型),驱动器的位置如图所示,其机械结构具有一定的对称性,输出平台是一个等边三角形1 2 3,再在其3顶点上铰链机构的其它部分。如图所示1、2、3分别是三驱动器产生的位移,作为机构的输入。在输出平台上建立坐标系,轴方向通过机构起始位置时的1点,其中心与输出平台起始位置时的几何中心相重合,它是平台运动的参考坐标系,输出平台的参数为平台位置和方位角。
文献介绍了用闭环线型原理对3RRR平面并联微动机器人建立运动学线性模型方法。图是该机构的全柔性铰链运动学刚性模型,刚性模型假设全柔性铰链只产生转动,其它结构假设为刚性体。根据力学中矢量封闭多边形原理,建立3个闭环多边形,得到6个方程,即可求出6个未知数。当已知三驱动器产生的位移1、2、3时,通过闭环6个方程式,并利用 MATLAB 7.1软件编程计算,就可得输出平台的位置和方位角值。用Jacobian矩阵来表示输入与输出位移的关系。然而,平面微动机器人的三驱动器(PZT)产生的位移很小(只有十几微米),理论上把输出与输入关系看成线性关系,即Jacobian矩阵值认为常数。
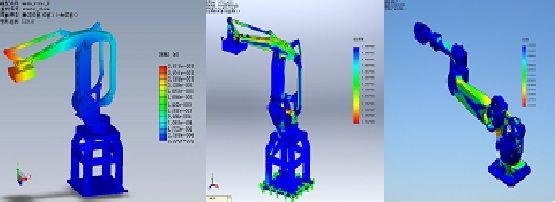
ANSYS是一种大型通用的有限元分析技术,计算功能强大,计算结果可靠的软件。有限元方法是一种采用计算机求解结构静、动态力学特性等问题的数值解法。ANSYS有限元分析软件主要包括3部分:前处理模块、分析计算模块和后处理模块。本研究用ANSYS对3RRR型平面并联微动机器人进行有限元分析过程中,首先用ANSYS 8.0软件对机器人建立有限元模型,模型的建立是通过点-线-面方法,并划定网格类型,材料参数为E=130GPa,泊松比0.3,对有限元模型施加相应的边界条件和约束,对C线段的进行全约束,线Ai(i=1,2,3)为载荷的施加处,并在线Ai(i=1,2,3)中心处分别定一节点,相应的节点位移代表输入位移;对有限元模型进行求解;对模型后置处理分析,在输出平台中心定义节点0,定义节点B1、B2,并用ANSYS软件显示节点0、B1、B2的X、Y方向的位移,以及线Ai(i=1,2,3)中心节点的X、Y方向的位移(输出列表如图所示),通过分析计算得到有限元Jacobian矩阵值。
专业从事机械产品设计│有限元分析│强度分析│结构优化│技术服务与解决方案
杭州纳泰科技咨询有限公司
本文出自杭州纳泰科技咨询有限公司www.nataid.com,转载请注明出处和相关链接!