 手机直线:
手机直线: 咨询热线:0571-56211150
咨询热线:0571-56211150








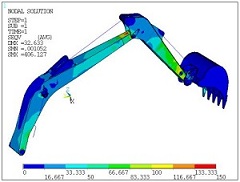
液压挖掘机在挖掘过程中负载变化剧烈,其各部件承受着各种恶劣工况下载荷的作用,其强度、可靠性和耐久性直接关系到挖掘机的工作性能和工作效率,因此对挖掘机进行工况研究和强度分析具有非常重要的意义。本文建立了某型挖掘机的动力学模型及整机有限元分析模型,通过虚拟试验得到各种危险姿态,并通过强度分析,确定出挖掘机最恶劣的工作姿态。
在挖掘机动力学模型中,为了避免过约束及模拟挖掘机工作装置实际运动情况,部分工作装置间采用球铰连接或是Bushing连接代替销轴连接,Bushing均只保留所需方向的自由度;上车部分各部件之间均采用固定副连接,与实际相符;因为下车部分各部件间的运动与本次分析无关,从减少计算时间考虑,下车部分各部件之间同样均采用固定副;上车部分及下车部分连接的部件分别为回转平台与回转支承,两者之问设置为转动副,与实际相符。如图所示的挖掘机动力学从挖掘机实际情况分析,各油缸的伸长和收缩、回转马达的正转与反转实现挖掘机工作状态的变化,因此在各油缸缸筒与活塞杆之间设置力函数实现油缸的主动推力或限定推力,在网转平台与网转支承间的旋转副设置位移驱动函数实现工作装置及上车部分的整体回转。
在模型建立之前,需要根据分析目的,对三维模型进行简化,具体原则如下:(1)除去一些不承受载荷的非关键螺栓、输油管道、一些小挂件等小部件;(2)对三维模型中一些建议误差予以天平或去除;(3)对很小的孔洞进行填补,例如原来为一些线路、非关键螺钉预留的孔洞;(4)对不在关键地方的倒角进行消除,比如铸件的棱边总是存在的倒角;(5)为了保证计算结果的精度,在各个部件的厚度或延伸方向上,至少有3层单元。(6)在一些过渡的地方,采用的网格单元数目要求能够反映出原来几何体的形状。如图所示,为挖掘机整机有限元模型,包括动臂、斗杆、铲斗、上车架、回转支撑、下车架等部件。其中,使用梁单元模拟动臂、斗杆、及铲斗油缸;各部件均根据实际物理样机建立连接关系。整机有限元模型包含157万单元,最小雅阁比0.1,其中雅阁比0.7以上的单元占到99%以上。
本次共确定了3种工况,分别为挖掘工况、提升制动工况及回转制动工况。在挖掘工况下,确定如图所示的10种工作姿态。其中挖掘力均施加在铲斗中齿齿尖,其力-向取决于挖掘机挖掘的方式,当挖掘机为铲斗一挖掘时,挖掘力垂直于斗杆与铲斗铰接点、铲斗中齿齿尖两点连线,当挖掘机为斗杆挖掘时,挖掘力垂直于斗杆与动臂铰接点、铲斗中齿齿尖连线。挖掘工况10种工作姿态分别为:姿态1:动臂油缸、斗杆油缸作用力臂最大,铲斗油缸处于最大挖掘力姿势;姿态2:动臂油缸作用力臂最大,斗杆油缸全缩,铲斗油缸处于最大挖掘力姿势;姿态3:动臂基准线水平,斗杆垂直于地面,铲斗油缸处于最大挖掘力姿势;姿态4:动臂油缸全缩,斗杆垂直于地面,铲一斗油缸处于最大挖掘力姿势;姿态5:动臂油缸和斗杆油缸作用力臂最大,斗杆与动臂铰点、斗杆与铲斗铰点、铲斗中齿齿尖二点共线;姿态6:动臂油缸全缩,斗杆垂直于地面,斗杆与动臂铰点、斗杆与铲斗铰点、铲斗中齿齿尖三点共线;姿态7:动臂油缸全缩,斗杆与斗杆油缸铰点、斗杆与铲斗铰点、铲斗中齿齿尖三点连线并且垂直于斗杆油缸;姿态8:动臂油缸、斗杆油缸、铲斗油缸均全缩;姿态9:斗杆油缸全缩,斗杆与动臂铰点、斗杆与铲斗铰点、铲斗中齿齿尖三点共线,调整动臂油缸使铲斗齿尖位于地面;姿态10:动臂油缸全缩,斗杆油缸作用力臂最大,斗杆与动臂铰点、斗杆与铲斗铰点、铲斗中齿齿尖三点共线。在此工况下,确定如图所示的2种工作姿态。此工况下,挖掘机受物料重力及回转制动力,其中物料重力取满载土重,作用于铲斗质心,方向为始终垂直向下;回转制动力大小取决于不同姿态下挖掘机的回转作用力臂的大小及最大回转制动力矩,作用于铲斗边齿齿尖,方向为垂直指向纸面内侧。
提升制动工况2种工作姿态分别为:姿态11:斗杆油缸全缩,铲斗油缸全伸,调整动臂油缸使斗杆与铲斗铰点离回转中心最远,则工作装置及上车部分整体向右侧旋转900。姿态12:动臂油缸及铲斗油缸全伸,调整斗杆油缸使铲斗齿缘线水平,工作装置及上车部分整体向右侧旋转900。在此工况下,确定3种工作姿态,如图所示。其中回转制动力均施加在边齿齿尖,方向为垂直指向纸面内侧。回转制动力的大小取决于不同姿态下挖掘机的回转作用力臂的大小及最大回转制动力矩。回转制动工况下3种工作姿态分别为:姿态13:动臂基准线水平,斗杆及铲斗斗缘线均垂直于地面。姿态14:斗杆油缸全缩,动臂与回转平台铰点、斗杆与铲斗铰点连线水平,铲斗斗缘线垂直于地面。姿态15与姿态11各油缸长度相同,只是载荷施加方法不同。
专业从事机械产品设计│有限元分析│强度分析│结构优化│技术服务与解决方案
杭州那泰科技有限公司
本文出自杭州那泰科技有限公司www.nataid.com,转载请注明出处和相关链接!